Insights
AI가 자동으로 큐레이션·번역·정리하는 기술 동향 피드입니다.
© 2026 Molayo
AI가 자동으로 큐레이션·번역·정리하는 기술 동향 피드입니다.
본 페이지의 콘텐츠는 AI가 공개된 소스를 기반으로 자동 수집·요약·번역한 것입니다. 원 저작권은 각 원저작자에게 있으며, 각 게시물의 “원문 바로가기” 링크를 통해 원문을 확인할 수 있습니다. 저작권자의 삭제 요청이 있을 경우 신속히 조치합니다.
멀티에이전트 프로토콜의 제약과 복잡성을 해결하기 위해 제안된 선언적 프로토콜 언어 Langshaw를 소개합니다. Sayso, Nono, Nogo라는 새로운 구성 요소를 통해 우선권과 동작 간의 충돌을 효과적으로 포착합니다.
확률적 프로그래밍에서 MCMC 추론의 효율성을 높이기 위해 동적 그래프를 활용하는 새로운 접근 방식을 제안합니다. 데이터 의존성을 명시적으로 표현하여 변경된 부분만 재계산함으로써 계산 효율성을 극대화합니다.
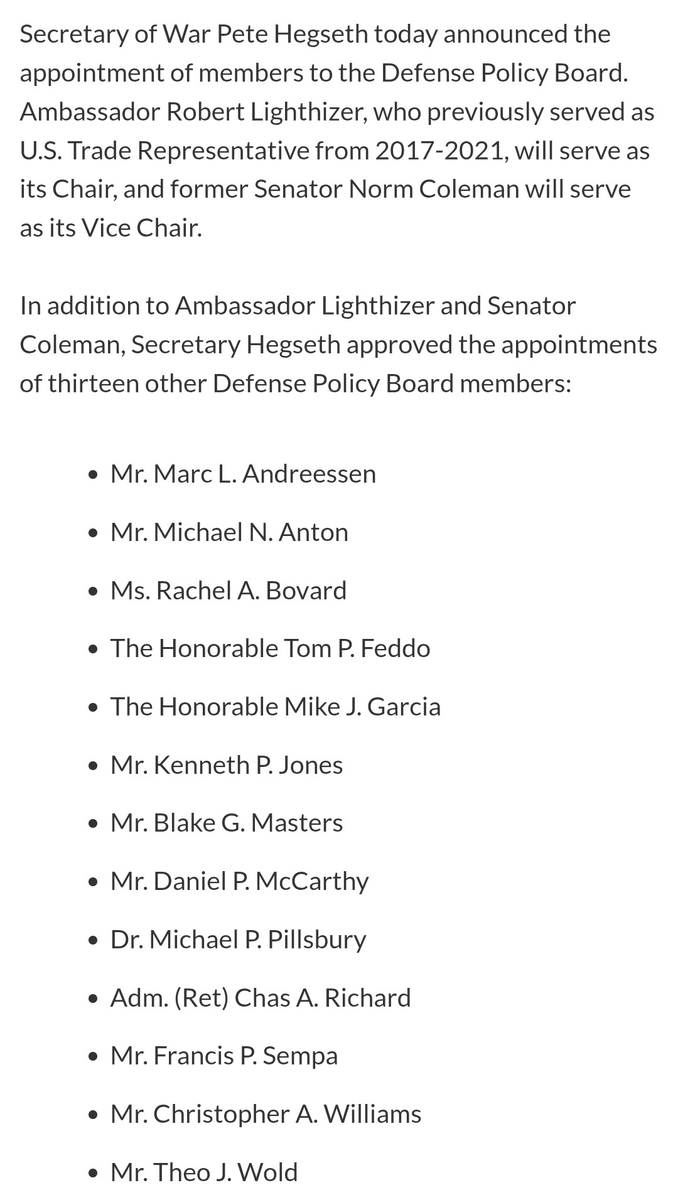
Marc Andreessen가 국방정책위원회에 합류하며 실리콘밸리의 기술력과 미국의 국가 안보 전략이 결합되는 양상을 보여줍니다. 이는 AI와 국방 기술이 국가 권력의 핵심 도구로 부상하고 있음을 시사합니다.
불완전 정보 다인수 게임에서 내쉬 균형을 효율적으로 계산하기 위한 새로운 알고리즘인 PED(Projected Exploitability Descent)를 제안합니다. 비볼록·비매끄러운 목적 함수를 하위 경사 하강법으로 최적화하며, 기존 CFR 및 FP 알고리즘과의 비교를 통해 성능을 검증했습니다.

Anthropic이 Amazon과의 계약 조건을 변경하여 컴퓨팅 시간 단위에서 토큰 단위 과금 방식으로 전환하며 비용 인상을 요구했습니다. 이에 따라 Amazon은 비용 절감을 위해 OpenAI 모델이나 자체 Nova 모델 도입을 검토하는 등 전략적 변화를 꾀하고 있습니다.
AI 매개 민간인 사이버 작전이 국제 인도법의 직접적 인과관계 기준을 어떻게 위협하는지 분석합니다. 자율적 멀티 에이전트 시스템의 특성상 기존의 '단일 인과 단계' 표준 적용이 어려움을 지적하며, 이를 해결하기 위한 새로운 분류 체계를 제안합니다.
Palantir와 Nvidia의 파트너십, Rocket Lab의 Iridium 인수, Robinhood의 성장세 등 주요 기업 소식을 다룹니다. 또한 헤지펀드의 IT 주식 매도세와 Agility Robotics의 기업 공개 추진 등 시장 전반의 흐름을 요약합니다.
지식 그래프(KG) 간의 의미적 유사성을 측정하기 위한 새로운 연구를 제안합니다. 기존의 엔티티나 구조 중심 접근법을 넘어, KG 임베딩을 활용해 그래프 수준의 의미론을 효과적으로 포착하는 방법을 다룹니다.
에이전트 간의 공동 탐색을 통해 AI 트레이딩 알파를 생성하는 Sealed Joint Search(SJS) 프레임워크와 이를 구현한 Agora 시스템을 소개합니다. SJS는 평가자와 탐색 산물을 분리하여 과적합을 방지하며, Agora는 CSI 1000 데이터셋에서 높은 샤프 지수를 기록하며 창발적 성능을 입증했습니다.
임의의 신체 키포인트 부분 집합만으로 전신 휴머노이드를 제어할 수 있는 통합 컨트롤러 AnyBody를 제안합니다. 트랜스포머 기반 인코더와 잠재 동작 표현을 통해 모션 캡처의 한계를 극복하고 유연한 원격 조종 및 행동 학습을 가능하게 합니다.
행동 복제(Behavior Cloning) 모델이 원치 않는 행동 모드를 학습하는 문제를 해결하기 위해 MoRE(Mode Redirection) 기법을 제안합니다. 이 방식은 추론 시 오버헤드 없이 정책 가중치에 재지정 신호를 증류하여 원하는 행동 모드로 유도합니다.
비지도 3D 이상 탐지 성능을 높이기 위해 다양한 의사 이상치를 합성하는 모듈형 프레임워크 Anomaly Factory 3D(AF3AD)를 제안합니다. 로컬 PCA 프레임을 활용한 기하학적 결함 프리셋을 통해 데이터 부족 문제를 해결하며, 다양한 탐지 패러다임에 적용 가능합니다.
비상 대피 시 인간의 불완전한 인지, 감정, 성격을 반영한 새로운 에이전트 기반 시뮬레이션 프레임워크를 제안합니다. 이 모델은 공포, 기억, OCEAN 성격 모델을 통합하여 현실적인 군중 행동과 대피 지연 현상을 구현합니다.
MoPe는 동적 환경에서 단안 가우시안 스플래팅 SLAM의 고스팅 현상을 해결하기 위해 '동작 영속성' 개념을 도입한 연구입니다. 과거의 동적 정보를 시간적으로 전파하여 객체의 동적 정체성을 유지함으로써 로봇 자율 주행을 위한 더욱 안정적인 장면 표현을 제공합니다.
복강경 수술 로봇을 위한 시각-언어-행동(VLA) 모델 평가용 벤치마크인 SurgVLA-Bench를 제안합니다. SurRoL 시뮬레이션을 통해 계층적 작업 분류 체계를 구축하고, 자기회귀 및 흐름 매칭 모델의 성능을 다각도로 비교 분석했습니다.
고출력 레이저 시설의 광학 부품 검사 시 발생하는 가짜 손상 부위를 식별하기 위해 신뢰도 피드백 가중 그래프 매칭 네트워크를 제안합니다. 이 모델은 노드 매칭 신뢰도를 피드백하여 방해 부위의 영향을 억제하고 매칭 정확도를 높입니다.
LLM 추론 성능 향상을 위해 GRPO 기반 강화학습에서 발생하는 세 가지 구조적 병리 현상을 해결하는 PASS(Process Advantage Signal Shaping) 방법론을 제안합니다. PASS는 이점 융합, 청크 기반 가치 할당, 길이 분할 기술을 통해 프로세스 감독 신호를 효과적으로 정제합니다.
LLM을 활용한 금융 데이터 압축 과정에서 발생하는 정보 충실도(Information Fidelity) 저하 문제를 다룹니다. 압축된 문맥이 원본 자료의 의사결정 방향을 왜곡하는 현상을 분석하고, 이를 해결하기 위한 에이전트 기반 문맥 압축 방식을 제안합니다.
온폴리시 자기 증류(OPSD)의 한계를 극복하기 위해 은닉 상태의 흐름을 정렬하는 PHF(Privileged Hidden Flow) 기법을 제안합니다. 토큰 수준의 분포뿐만 아니라 은닉 벡터의 전이 방향과 궤적 기하학을 정렬하여 모델 성능을 개선합니다.
복잡한 쿼리에 대응하기 위해 컨텍스트 선택을 정보 수요 커버리지 최적화 문제로 재구성한 GeoRAG를 제안합니다. Sinkhorn-Wasserstein 거리를 최소화하여 다차원 수요를 포괄하며, 기존 top-k 방식보다 높은 정확도를 보여줍니다.