Guava: 로봇 조작을 위한 범용 하네스 (universal harness)
요약
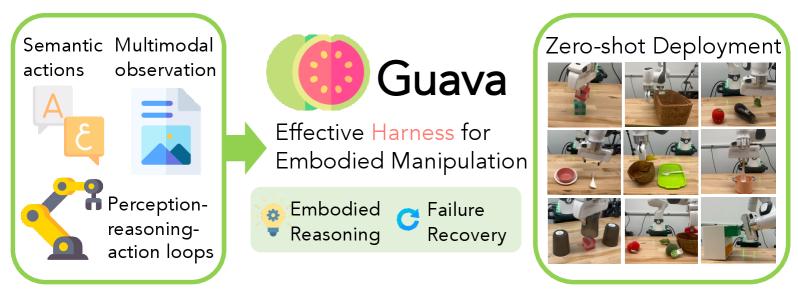
2K 미만의 시뮬레이션 궤적으로 학습된 4B 규모의 오픈 소스 모델인 Guava를 소개합니다. 이 모델은 실제 환경에서 폐쇄형 모델과 대등한 성능을 보이며, 미학습 물체와 장기 작업에 대해 뛰어난 제로샷 일반화 능력을 입증했습니다.
핵심 포인트
- 2K 미만의 적은 시뮬레이션 데이터로 학습 가능
- 4B 파라미터 규모의 오픈 소스 모델
- 최첨단 폐쇄형 모델과 대등한 실제 작업 성능
- 미학습 물체 및 장기 작업에 대한 제로샷 일반화
2K 미만의 시뮬레이션 궤적 (simulation trajectories)으로 학습된 4B 오픈 소스 모델이 실제 세계 작업에서 최첨단 폐쇄형 모델 (frontier proprietary models)과 대등한 성능을 보이며, 보지 못한 물체와 장기 작업 (long-horizon tasks)에 대해 제로샷 (zero-shot) 일반화 성능을 나타냅니다. https://t.co/c5edy44Po2
AI 자동 생성 콘텐츠
본 콘텐츠는 X @huggingpapers (검증됨)의 원문을 AI가 자동으로 요약·번역·분석한 것입니다. 원 저작권은 원저작자에게 있으며, 정확한 내용은 반드시 원문을 확인해 주세요.
원문 바로가기0